Sampling Algorithms in BOSA Oscilloscopes
Tech study | July 23, 2021
Here we will try to clarify some issues related to the sampling algorithms used in digital oscilloscopes and particularly in our automotive oscilloscope BOSA. So, what is real-time sampling (RTS) and what is equivalent-time sampling (ETS)? With the development of today's Digital Storage Oscilloscopes (DSO), there is a need for some understanding of their specific features and modes of operation, unknown in the era of the old classic analog oscilloscopes.
Real-time sampling
When the analog-to-digital converter (ADC) used in the oscilloscope is fast enough, and the data points are sampled at short intervals, the observed signal can be reconstructed with sufficient accuracy at once, for only one trigger event. In this way, the oscillogram and signal will correspond to the same moment in time. In this case, we are talking about sampling in real-time. The advantage of this algorithm is the ability to correctly observe non-periodic signals and single pulses in both auto and single (or waiting) trigger modes. The maximal real-time sampling rate of the BOSA oscilloscopes is 2 MS/s on a single input channel. Of course, it is worth mentioning that measurement of high-frequency signals in real-time always requires high-speed hardware, which leads to complications and costs for the oscilloscope in general.
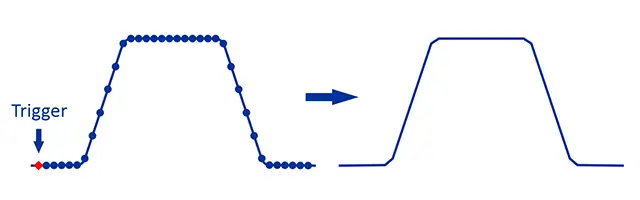
But what about the situation when the maximum real-time sampling rate is not enough to collect all the required data points, and thus, it is not possible to reconstruct the signal correctly, as shown in the figure below.
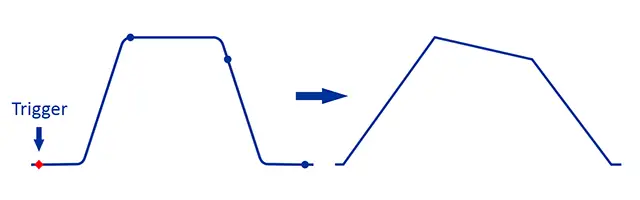
More about BOSA oscilloscope operation modes, you can find in the User Manual.
Equivalent-time sampling
If the input signal is periodic, we can make several successive measurements, each time starting from a slightly delayed moment in time after a trigger event. The figure below shows an example of signal reconstruction using six successive measurement cycles. The first cycle starts at the trigger event, and each subsequent is starting after the previous in one-sixth of the real-time sampling interval. The described process is equivalent to measurement at a rate six times faster than the maximum real-time sampling rate. Hence the name equivalent-time sampling. After some processing of the collected points, the signal can be reconstructed with the required quality.
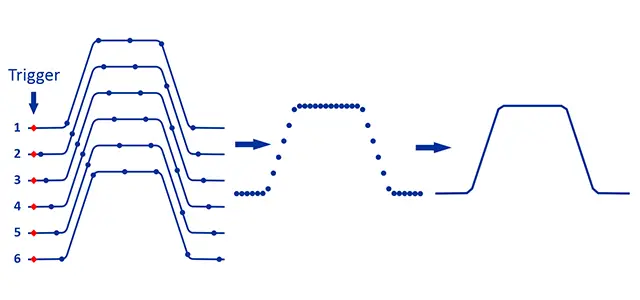
It is important to notice that the measured signal should be strictly periodic to make the process described so far work accurately. Otherwise, after signal reconstruction, the resulting oscillogram will not represent the real shape of the waveform and its variations over time. Thus, when the oscilloscope operates in equivalent-time sampling mode, the single (or waiting) trigger does not make sense.
On our library page you can find more information about modern vehicle diagnostics.
The automotive diagnostic oscilloscope BOSA uses equivalent-time sampling in time ranges from 1 µs to 100 µs, reaching to a maximum sampling rate of 70 MS/s. This mode allows for a detailed view of periodic high-frequency signals such as digital packets transmitted on the CAN data bus. Using equivalent-time sampling, it is easy to view the shape of the signal edges in great details and determine the voltage levels on the bus. Thus, making precise diagnostics of the CAN hardware as a whole. Unfortunately, the content of the transmitted packets cannot always be reconstructed accurately as a consequence of the above-described specifics of this measurement mode.
Stream sampling
The BOSA scopes offer one more measuring mode called Stream. It is characterized by uninterrupted transmission of data between hardware unit and the computer. That is important in the situation of observing random signals or single impulses. More about this mode you can read on the BOSA automotive oscilloscopes hardware description page.
Learn more about capabilities, working modes and settings of StudioBOSA car diagnostic application. Call us on our contact page if you have more questions.