Space Weather Monitoring Using AMR Magnetometer
Sci report | April 03, 2022
A new magnetoresistive vector magnetometer with improved temperature stability has been constructed. The instrument is installed in an observational place without magnetic disturbances near Stara Zagora city. A comparative analysis between collected geomagnetic data and data from different INTERMAGNET observatories is made. Preliminary results show similarities in the observed time series and the dynamics of registered geomagnetic processes. The instrument is suitable for use in Space Weather monitoring applications.
Introduction
The anisotropic magnetoresistive (AMR) effect in ferromagnetic materials was discovered by William Thomson (Lord Kelvin) in 1856. It takes more than a century until the advance of thin-film technologies allowed its practical use. Sensors based on this effect are suitable for industrial applications where strong magnetic fields are present and measurements within the range of the Earth's magnetic field. Modern implementations of such types of sensors show sensitivity, frequency response and signal-to-noise ratio comparable and sometimes superior to those shown in the conventional magnetometers used in geophysical applications, such as a Fluxgate Magnetometer, Proton Precession Magnetometer or magnetometers based on the Overhauser effect. Moreover, AMR sensors are superior in terms of low cost, miniature size and negligible electric current consumption. From this point of view, naturally arises the question of their applicability in geomagnetic research. An attempt to give a short preliminary answer to this question is the essence of this report.
Magnetometer description
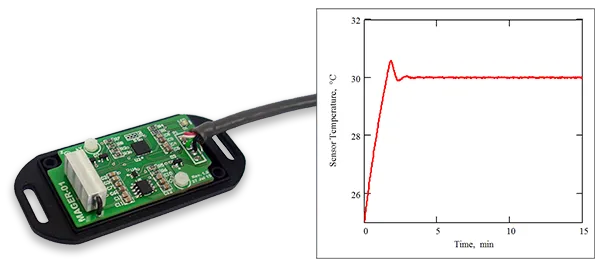
The new vector magnetometer MAGER™ is an advanced version of the previously described USB portable magnetoresistive magnetometer µMeter [1] [3]. Present instrument implements a system for magnetic sensor temperature stabilization, based on the negative feedback with PI (Proportional, Integral) algorithm implemented through PWM (Pulse Width Modulation) with variable duty cycle, driven by the embedded microcontroller. The magnetic measuring module and the temperature sensor are mounted on the PCB in adjacent places so that the temperature of both chips is established to be the same through a common aluminum block mounted on top of them. For better contact between surfaces thermally conductive compound is used. A non-magnetic resistor, embedded inside in the aluminum block, acts as a heater. The controlling system uses a single N-channel MOSFET connected as a low-side switch to drive the current through the heating resistor.
The signal of the temperature sensor is digitized by a 12-bit ADC and is fed to the microcontroller, where it is numerically processed in order to calculate the current duty cycle value of the PWM. A minimum limit of 40% duty cycle is set (values vary between 40% and 100%) and the magnetic data are obtained during the off-state period (from 0% to 40%). Thus, the interference with the current flowing through the heating resistor is eliminated (the remaining MOSFET's leakage current has a magnitude of tens of nA and in this case, can be ignored). The temperature control system operates with a frequency of 4 Hz. The figure above shows the common view of the magnetometer with the aluminum heating block. On the right, the result of the temperature stabilization operation is demonstrated. Notice the initial settling time for the temperature around its final set point. The achieved accuracy is better than 0.01 °C at 1 Hz sampling frequency.
Software
The magnetometer is designed as a USB Human Interface Device (HID) and does not need USB driver installation on the computer. In addition, to control the magnetometer operation, specialized software was developed using C# and Microsoft .NET Framework. The main screen of the program is shown in the picture below.
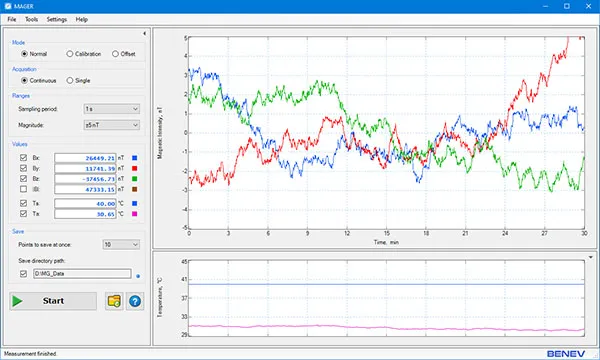
The software is intended to visualize magnetic data in graphical and numerical formats, save them to the computer's hard drive as text files, manage basic modes of operation like sampling rate, intensity range, set the calibration and temperature control coefficients. The application has an intuitive and simplified interface and is very easy to install and use.
Installation and operation
The instrument is installed in the observational place 12 km from Stara Zagora city. The location was chosen as relatively easily accessible and yet far enough from the city to minimize magnetic interference of the urban environment. The magnetometer was placed in a watertight plastic box, mounted on the bottom of the special non-magnetic shaft, dug into the ground at a depth of about 1 m. Control is fully automatic and is carried out by a PC workstation placed at a distance of 10 m from the shaft. The data are saved to the computer's hard drive in continuous mode as formatted text files with a sampling frequency of 1 Hz. Time is recorded as UTC (Universal Time Coordinated) and the synchronization is done via a Wi-Fi connection to the Internet. Before installation, the magnetometer was calibrated in situ following the procedure described in [2].
Results
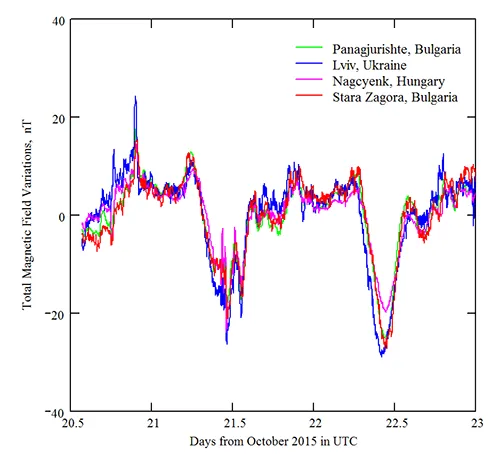
In the initial analysis of magnetometer data, some residual dependence of daily variation in ambient temperature was established. Although with a temperature stabilizing system of the magnetic sensor, described earlier, the device as a whole is in an environment without constant ambient temperature and its drift affects the work of the other electronic components in the magnetometer circuit. To reduce this effect, we use the following procedure: the relation between uncorrected observational data and ambient temperature Ta expressed in the form of third-degree least-squares regression polynomial is subtracted from the raw magnetometer data, or:
Fcorr = Fraw - ( a3⋅Ta3 + a2⋅Ta2 + a1⋅Ta + a0 )
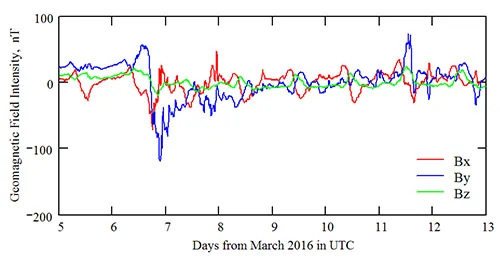
where Fcorr and Fraw are the corrected and row values of the magnetic data, respectively. a0 to a3 are coefficients of the calculated third-degree polynomial. A similar procedure is described in [4], but it uses a linear function of the temperature. The next figure depicts our corrected data and the one-minute data series collected in three geomagnetic observatories situated in the region of Eastern Europe as a part of INTERMAGNET (International Real-time Magnetic Observatory Network). Our data are averaged to one-minute samples and filtered using a 5-minute bidirectional low-pass digital filter. As an attempt for preliminary analysis, we can emphasize the fact of nearly perfect correlation (the coefficient of correlation is about 95%) between the Stara Zagora series and the other observational data.
Conclusion
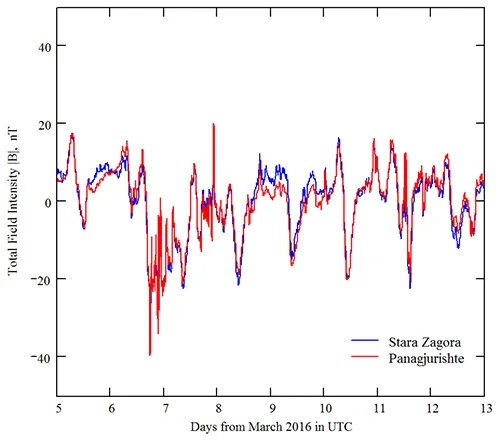
А new AMR magnetometer MAGER with improved temperature stabilization of the magnetic sensor has been developed and is reported in this work. The obtained results are demonstrated and compared to the results in other geomagnetic observatories located in Eastern Europe. Preliminary analysis shows a high correlation between our data and these from INTERMAGNET observatories. In the case of the geomagnetic observatory in Panagjurishte (PAG), Bulgaria, the correlation coefficient is 92%. As a future work, we plan to improve the conditions at which the magnetometer is placed to reduce the influence of the ambient temperature on the recorded geomagnetic data series. At this stage of our research, we can conclude that our instrument successfully proves that the magnetoresistive sensor technology can be used in geomagnetic applications and especially in Space Weather monitoring and analysis.
Reference
- Benev B., Stoev A., Stoeva P.
Portable 3D magnetometer for local geomagnetic field disturbance measurements
, SES 2012, pp. 345-347, 2013. - Renaudin V., Muhammad A., Lachapelle G.
Complete triaxis magnetometer calibration in the magnetic domain
, Journal of Sensors, Vol. 2010, article ID 967245, 2010. - Stoev A., Maglova P., Benev B.
Investigation of the variations of geomagnetic activity on the territory of ancient rock sanctuaries
, SES 2012, pp. 76-81, 2013. - Uozumi T., Yumoto K., Kitamura K., Abe S., Omoto T., MAGDAS Group.
A calibration technique for temperature drift of MAGDAS magnetometer data
, Earth & Planet. Sci., Vol. XXXII, No. 2, pp. 95-104, 2009.
Short version of this report was presented at the First VarSITI General Symposium, June 6-10, 2016, Albena, Bulgaria and at the Eleventh Scientific Conference with International Participation "Space, Ecology, Safety" November 04-06, 2015, Sofia, Bulgaria.