Метод за калибриране на уредите SATI
Научен доклад | 09 май 2022
В настоящата работа е предложен метод за калибриране на оптични уреди от тип SATI (Spectral Airglow Temperature Imager) [2] [3], като алтернатива на традиционните методи, прилагани досега и включващи използването на интегрираща фотометрична сфера. Демонстрираният тук подход използва предварително установен закон за осветеността по зрителното поле на инструмента. Експериментално полученото плоско поле (flat-field) се обработва числено и се коригира в зависимост от разпределението на осветеността в описаната схема. Постигнатата точност е не по-малка от 0.5%. Някои от най-важните предимства на изложения метод са простотата на техническата му реализация и преносимостта, което е от съществено значение за съвместното калибриране (cross-calibration) на SATI инструменти, работещи на различни географски места.
Въведение
Съвместното калибриране и тестване на оптичните инструменти за изучаване на нощното светене на горните слоеве на атмосферата е една от целите на международните научни проекти NATO CLG и INTAS. Изпълнението на тази задача е свързано и с изграждането на евтино лабораторно съоръжение за калибриране и тестване на уредите.
В тази статия представяме метод за калибриране на SATI инструменти, прилаган при калибровката на уреда SATI-3SZ, инсталиран в наблюдателен пункт край гр. Стара Загора. Предложената схема е алтернатива на методите за получаване на плоско поле чрез интегрираща фотометрична сфера, прилагани досега [1]. Изложеният подход се придържа към предварително зададени технически параметри, като набляга на изискването за лесна преносимост на разработената установка.

Дизайн на метода
Калибровката на SATI-3SZ включва два етапа:
- Определяне на енергитичната характеристика (чувствителност) на уреда, в цялото работно поле и с входна апертура, равномерно запълнена с хомогенно спектрално излъчване.
- Привързване на така определеното плоско поле към радиометричен стандарт, калибриран в абсолютни енергетични единици.
За реализацията на първия етап са предложени няколко схеми:
-
Калибрирането на SATI следва оптичната схема, разработена от канадски специалисти от Centre for Research in Earth and Space Science (CRESS), York University в Торонто, и е показана на фигурата по-долу. Малък светлинен източник осветява плосък, дифузно отразяващ бял екран. Разсеяната светлина се отразява от белия пръстен, поставен около тялото на уреда, по посока към вътрешната страна на полусферична повърхност и накрая попада в зрителното поле на инструмента.
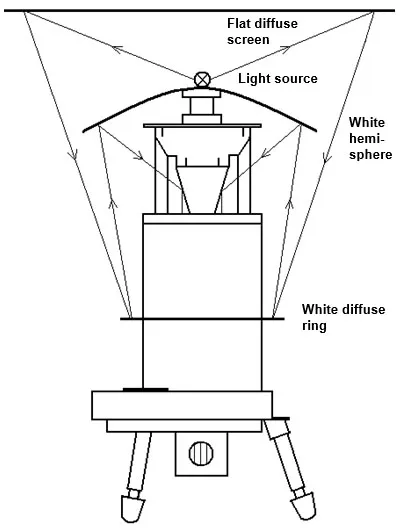
Схема за калибриране използваща бяла отразяваща полусфера. Тази схема има един важен недостатък. Тя не осигурява еднаква осветеност по цялото зрително поле на SATI. Следователно получените резултати следва да се приемат като недостатъчно коректни.
-
Калибриране на SATI-3SZ чрез интегрираща фотометрична сфера. Поради специфичната конструкция на използваната от нас сфера, осветителната схема (четири малки халогенни лампи, разположени близо до входа на сферата) не осигурява еднаква яркост на разсейващата повърхност. Не е извършено прецизно измерване на яркостта в радиална посока, което е недостатък на конкретното изпълнение. Повечето интегриращи сфери са пригодени за фотометрични инструменти с централно и сравнително малко зрително поле, докато инструментите от типа SATI или MORTI (Mesopause Oxygen Rotational Temperature Imager) [3] имат пръстеновидно зрително поле с външни граници, достигащо до 70°. Последният факт поставя нови строги изисквания за хомогенност на осветеността на калибриращата сферична повърхност, както и за качеството на отразяващото покритие.
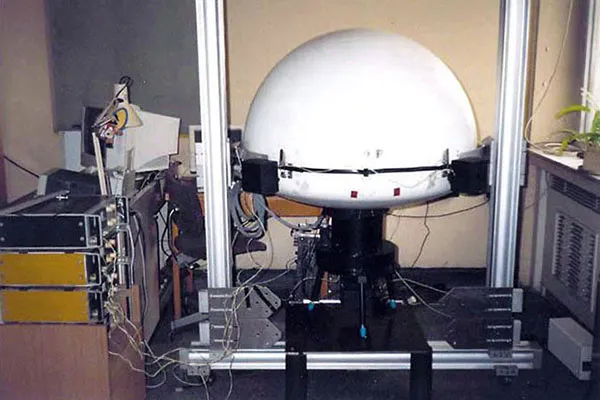
Калибрираща установка на уреда SATI с фотометрична интегрираща сфера. При сравняване на резултатите получени с интегрираща сфера и тези, получени чрез предложената от нас методология, описана в следващия раздел, се забелязва, че относителната разлика между тях е не повече от 2%. И все пак, горния метод изисква скъпо и сложно лабораторно оборудване, както и не притежава необходимата степен на преносимост, важна за съвместната калибровка на оптичните уреди.
Метод използващ плоска разсейваща повърхност
Предложеният от нас подход използва плоска разсейваща повърхност. Той има няколко предимства в сравнение с предишните методи и е много подходящ за съвместно калибриране на отделните инструменти от този тип. Схемата на установката е показана на следващата фигура.
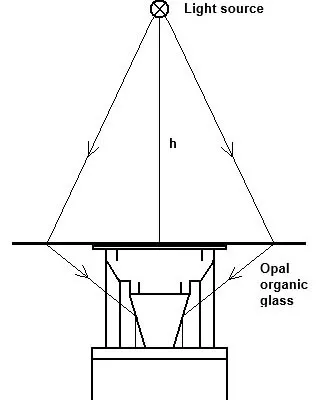
Точков светлинен източник S е разположен на разстояние h (в нашия случай 1500 mm) по оптичната ос над SATI и осветява плосък разсейващ екран, фиксиран върху уреда. Съображенията за избор на плоска повърхност са следните:
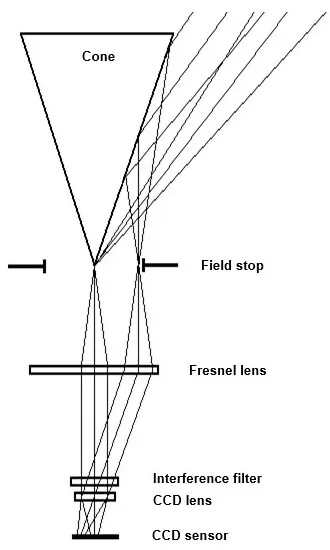
Поради специфичната оптична схема на SATI, светлинните лъчи, образуващи различни ъгли на падане към интерференчния филтър, виждат
плоската повърхност винаги под един и същ ъгъл. Успоредните светлинни снопове, падащи върху филтъра, излизат от виртуални точкови източници, разположени по радиуса на входната диафрагма, в предната фокална равнина на Френеловата леща. Тези виртуални точкови източници от своя страна се образуват от светлинни лъчи с еднакво ъглово разпределение (между 26° и 34°), но падащи върху коничното огледало на различни височини. С други думи, тези снопове са идентични, като само се транслират по височина спрямо върха на коничното огледало. Следователно, не е необходимо разсейващата повърхност да е строго Ламбертова (Ламбертовата повърхност има свойството да разсейва светлината в различни ъглови направления по точно определен начин, описван чрез косинов закон от ъгъла спрямо нормалата към повърхността. Като следствие, яркостта в различните направления е еднаква).
Всяка хомогенна бяла повърхност, разсейваща в достатъчна степен преминаващата светлина, може да бъде използвана като дифузор. В нашата установка ние използваме плоскост от бял плексиглас (органично стъкло) с дебелина 4 mm.
Друго съображение в подкрепа на плоската разсейваща повърхност е добре познатото радиално разпределение на осветеността в предложената оптична конфигурация, изразяващо се чрез закона на Ламберт: Е = I cos(θ) / L2. По този начин, осветеността EP в точка P на разстояние r от оптичната ос се дава с израза:
EP = I ⋅ h2 / (r2 + h2)3/2
където I е интензитетът на светлинния източник, приет за удобство равен на единица. На практика той трябва да има достатъчно висока стойност, за да осигури необходимото отношение сигнал/шум (signal-to-noise ratio, SNR) за типична SATI експозиция от 120 s. Тъй като h е 1500 mm, а r е почти десет пъти по-малко, горната формула може да бъде опростена с помощта на развитие в ред на Тейлър, така че получаваме:
EP ≈ I / h ⋅ (1 - 3/2 ⋅ r2 / h2)
В нашия случай, максималната разлика между точната и приближената формула е не повече от 0.05%.
Практическо изпълнение
Като точков светлинен източник се използва малка халогенна лампа с мощност 100 W. Пред нея е поставен диафрагмен отвор с диаметър 10 mm и залепено към него двустранно матирано стъкло с дебелина 2 mm. Както е добре известно, халогенната лампа има непрекъснат спектър на излъчване с форма, близка до крива на Планк при Teff ≈ 3000 K. Това осигурява хомогенен спектър в целия работен диапазон на SATI от 8645 Å до 8680 Å. Разликата в интензитета на излъчване между двете крайни дължини на вълната е не повече от 0.25%.
Получени са приблизително 250 изображения при типична SATI експозиция от 120 s и след това са осреднени. Изображенията с ток на тъмно се записват след всеки осем нормални изображения. Файлът с плоско поле, получено по този начин, трябва да бъде числено коригиран поради разликата в осветеностите ΔEP1,P2 на двете точки P1 и P2, разположени в радиално направление на разстояние, съответно r1 и r2, по протежение на зрителното поле на уреда. ΔE намалява с увеличаването на h. В случая на SATI-3SZ, h е 1500 mm, така че ΔE е по-малко от 1.5%.
Следващата фигура демонстрира факта, че виртуален точков източник S', разположен на разстояние x от оптичната ос в равнината на входната диафрагма D, се формира от лъчите, идващи от пръстеновидна зона на дифузора, заключена между радиусите r1 и r2.
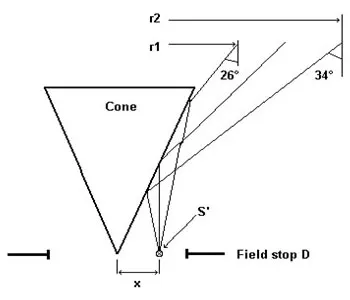
Или, конкретно за SATI-3SZ:
r1(x) = 330⋅tan(26°) - 1.110⋅x
r2(x) = 330⋅tan(34°) - 1.203⋅x
Тук r1, r2 и x са изразени в mm. От друга страна, при дадено h, общият енергетичен поток от източника S' може да бъде записан като определен интеграл, взет в граници от r1(x) до r2(x), или:
Ф(х) = ∫r1(x)r2(x) E(r) dr
За удобство, Ф(х) се изразява като функция от радиуса Rb на дадена радиална зона от изображението, изразен в бинове (в нашия случай, един бин е съставен от 2×2, т.е. четири съседни пиксела от CCD матрицата на камерата), а оттам и като функция от дължината на вълната λ. За целта се използват следните зависимости:
x = 0.312⋅Rb
λ = λ0 ⋅ (1 - Rb2 / (µ2 ⋅ (6252 + Rb2)))1/2
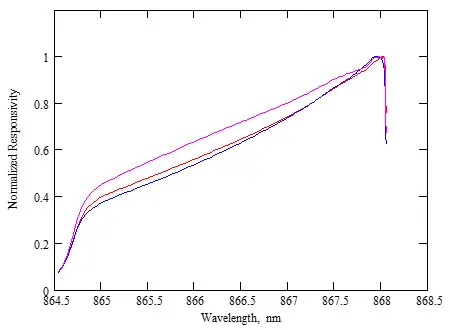
Числовите коефициенти 0.312 и 6252 се определят от специфичните геометрични параметри на SATI-3SZ, като фокусното разстояние на обектива на CCD камерата, фокусното разстояние на Френеловата леща и размера на един бин. λ0 и μ са, съответно централната дължина на вълната на интерференционния филтър и ефективния му показател на пречупване. Експериментално полученото плоско поле се коригира с числения коефициент Ф = Ф(λ), нормализиран към единица, спрямо максималната му стойност. Резултатът е представен на фигурата по-долу. Вижда се, че този профил съвпада много точно с профила, получен при калибрирането с фотометрична сфера, като относителната разлика между двата е не повече от 2%. Като най-вероятна причина за това може да се посочи неравномерността в яркостта на разсейващата повърхност на сферата, попадаща в зрителното поле на уреда.
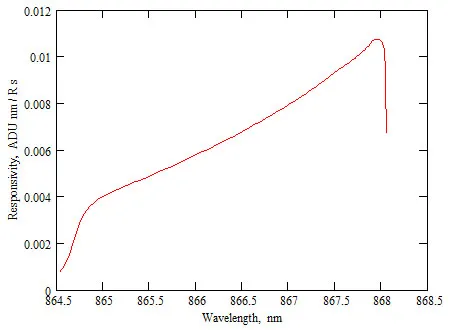
Вторият етап в процеса на калибриране е определянето на чувствителността на уреда, изразена в абсолютни енергитични единици. За целта се използва Радиометър/фотометър модел 730A, Optronic Laboratories Inc., настроен в радиометричен режим и оборудван с радиометричен филтър. Приемникът измерва енергитична яркост в W/cm2•sr. Филтърът осигурява постоянна чувствителност на радиометричния сензор в диапазона от 480 nm до 1000 nm с точност ±5%. Яркостта на дифузора се определя в 10 точки, разположени в кръг с радиус 185 mm и след това се осреднява. При измерването се отчита и факта, че количеството лъчиста енергия, регистрирана от радиометричния приемник, се изразява чрез интеграла от произведението на спектралната чувствителност на сензора и спектралния профил на източника на светлина (приели сме, че източникът излъчва като абсолютно черно тяло с ефективна температура 3000 К). SATI има много тесен честотен диапазон (8645 Å – 8680 Å), така че енергията, регистрирана от инструмента, е около 120 пъти по-малка от тази, измерена от радиометъра. Получената средна чувствителност е 131 R/nm на ADU/s, където ADU е една аналогово-цифрова единица или просто брой отчитания. Окончателният осреднен профил на плоско поле за SATI-3SZ, изразен в ADU•nm/R•s за дадена дължина на вълната λ, е показан на фигурата по-долу.
Заключение
Като основен източник на неточност в предложения метод следва да се посочи нехомогенността в използвания дифузор, която може да бъде определена експериметално и коригирана при необходимост. Друг източник на грешка може да е недоброто центриране на светлинния източник спрямо оптичната ос на уреда. От показаните резултати могат да бъдат направени следните обобщения:
-
Представеният метод осигурява висока прецизност при калибриране и получаване на плоско поле на инструменти от типа SATI–MORTI. При h = 1500 mm разликата в общите енергитични потоци, формиращи двата крайни успоредни светлинни снопа, падащи към интерференционния филтър под 0° и 11°, съответно, е около 0.4%. След числена корекция, точността на получения профил е не по-ниска от 0.1%. Трудностите за получаване на по-голяма точност, най-вероятно, се определят от нехомогенносттите в използваната разсейвателна плоскост, а също и от спектралните характеристики на източника на светлина. Важно предимство на предлагания от нас метод е неговата техническа простота и особено лесната преносимост, важна за съвместното калибриране (cross-calibration) на инструментите SATI–MORTI, опериращи в различни наблюдателни пуктове.
-
Полученото плоско поле показва чувствителността на уреда спрямо непрекъснат спектър. Сигналът, получен от SATI, е суперпозиция от дискретен спектър (шестте емисионни двойни линни в честотния интервал (0-1) от системата O2 атмосферно нощно светене), насложен върху спектрално непрекъснат хомогенен фон. Пресметнатото плоско поле всъщност е SATI отклика към този фон. Поради спектралния характер на инструментите от този тип, при описаната по-горе процедура на калибриране, чувствителността на инструмента към дискретни, спектрално тесни линии или т.нар. точкова функция на разсейване (Point Spread Function, PSF) остава неизвестна. А тя играе ключова роля при изчисляването на абсолютните ротационни температури.
Формата на спектралния профил на инструмента (PSF) е от основно значение при конволюирането на синтетичните спектри. Малки промени в него водят до получаването на различни ротационни температури. Затова, спектралната чувствителност на уреда трябва да бъде определена с достатъчно висока точност. Една интересна особеност е факта, че при вариране на използвания спектрален профил, характерният вид на температурния ход, за дадена нощ на наблюдение, остава същият и се транслира само по абсолютна стойност. Тук можем да предложим няколко подхода за решаване на този проблем. Първият (по-точен) изисква извършването на спектрално калибриране [2]. За тази цел, разсейвателната повърхност се осветява от източник на светлина (прецизен монохроматор с ширина на линията около 0.1 nm или лабораторен лазер с висока степен на кохерентност), излъчващ в спектрален диапазон, достатъчно тесен в сравнение с линейния профил на интерференционния филтър. Необходимо е да се вземе, с достатъчна голяма точност, точковата функция на разсейване на SATI, поне в две крайни дължини на вълната от работния спектрален интервал между 8645 Å и 8680 Å.
Другият подход се основава на предположението, че характеристиката на инструмента спрямо дискретен спектър е достатъчно близка до характеристиката спрямо непрекъснатия фон. По този начин, при обработката на данни, ще се прилага само полученото чрез някои от гореописаните методи плоско поле. Пресметнатите стойности за емисиите и ротационните температури от SATI, трябва да бъдат съпоставени с по-точни, получени чрез други методи и оборудване, например от лидарни системи (Lidar systems).
Третият подход се състои във възстановяване на точковата функция на разсейване (PSF) при известни сигнали на входа и изхода на инструмента. Нака f(λ) е правоъгълна спектрална функция на входа на системата и нека профилът на плоското поле g(λ) е нейното изображение. Следователно, тъй като системата е линейна, връзката между f(λ) и g(λ) се дава с уравнението за конволюция:
g(λ) = f(λ) ∗ PSF(λ)
Тук обаче възниква една трудност. Системата е линейна, но PSF се променя в плоскостта на изображението между 8645 Å и 8680 Å. С други думи, системният оператор A не комутира с оператора за транслация T:
A[T[f(λ)]] ≠ T[A[f(λ)]]
Решението на горния проблем ще бъде предмет на бъдеща работа.
Също така, в бъдеще предвиждаме, спектралният профил на източника на светлина да бъде измерен с достатъчно висока точност. Цялата установка за калибриране и получаване на плоско поле ще бъде реализирана в компактна преносима версия.
Литература
- Sargoytchev S., Brown S., Solheim B., Cho Y., Shepherd G., Lopez-Gonzalez M.
Spectral airglow temperature imager (SATI) – a ground-based monitor of mesosphere temperature
, Applied Optics, 2004. - Shepherd G.
Spectral imaging of the atmosphere
, International Geophysics Series, Vol. 82, 2002. - Wiens R., Zhang S., Peterson R., Shepherd G.
MORTI: a mesopause oxygen rotational temperature imager
, Planet. Space Sci., Vol. 39, No. 10, pp. 1363-1375, 1991.
Една предварителна версия на този доклад беше представена на Joined NATO-CLG/INTAS Workshop Investigation of Regional Scale Atmospheric Motions and their Influence on the Mesosphere/Thermosphere/Ionosphere Region
, 6-10 септември, 2004 г. Гранада, Испания.